Locate
Edge Intersection
Bestimmt den Schnittpunkt zweier Liniensegmente innerhalb eines Bildes.
Flow

Parameterset
Parameter | Typ | Beschreibung | Beispiel |
|---|---|---|---|
Image 1 | Image | Ein Graustufen- oder Farbbild ist möglich. | |
Segment 1 | Segment 2D | Das erste Segment | |
Segment 2 | Segment 2D | Das zweite Segment | |
Draw Result | Boolean | zeichnet das Ergebnis im Bild ein | |
Color | Color | Passt die Farbe der eingezeichneten Linie an. | |
Line Type | LineType | Passt die Berechnung des Linientyps an:
| |
Thickness | Int32 | Passt die Dicke der Linie in Pixeln an. | |
Return | Intersection | Ein Punkt, der den Schnittpunkt der beiden Segmente darstellt, sofern sich diese innerhalb der Bildgrenzen schneiden. | |
Return | Image | Rückgabebild | 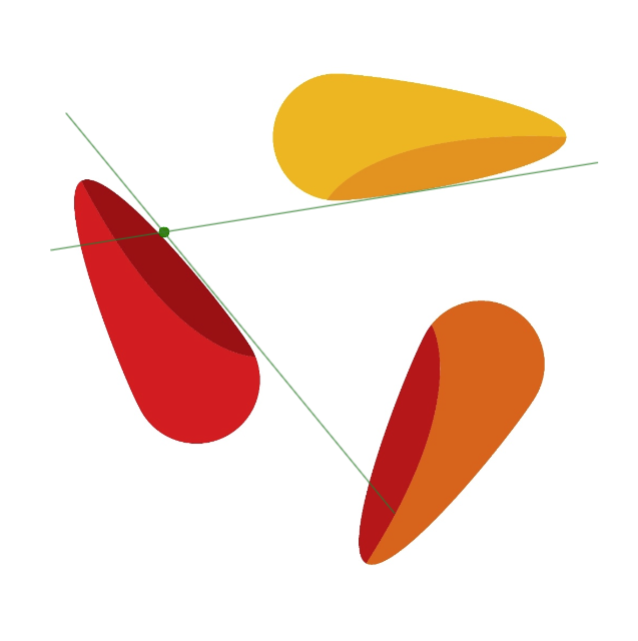 |
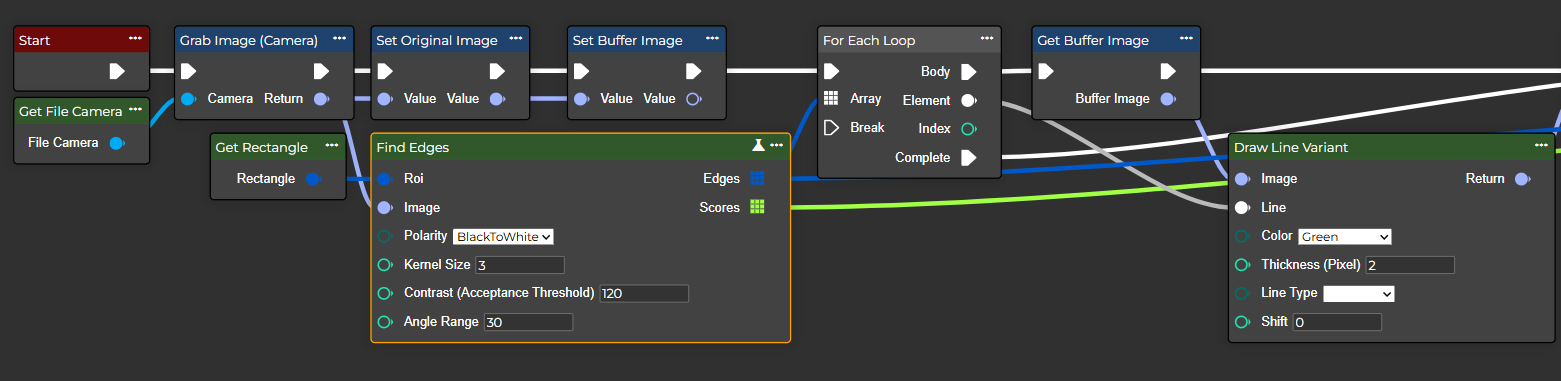
Find Edges
Dies ist der Prozess der Kantenerkennung in einem Bild. Kanten stellen signifikante Übergänge in Intensität oder Farbe dar und entsprechen häufig Objektgrenzen oder -merkmalen.
Flow
Parameterset
Parameter | Typ | Beschreibung | Wertebereich |
|---|---|---|---|
Roi | Rectangle | Für diese Eingabe kann eine Annotation (Rechteck) im Workflow hinzugefügt werden oder den „Make Rectangle“-Knoten dafür verwenden. | |
Image | Image | Ein Graustufen- oder Farbbild ist möglich. | |
Polarity | EdgePolarity | Bezieht sich auf die Unterscheidung zwischen positiven und negativen Gradienten, Kanten oder binären Zuständen in der Bildverarbeitung. |
Mögliche Werte:
|
Kernel Size | Int32 | Ein hoher Wert erhöht die Kernelgröße für Gradientenberechnungen größerer Bereiche. Die Größe des erweiterten Sobel-Kernels muss 1, 3, 5 oder 7 betragen. |
Mögliche Werte:
|
Contrast (Acceptance Threshold) | Int32 | Bezieht sich auf den Unterschied in der Intensität zwischen hellen und dunklen Bereichen im Bild. |
Mögliche Werte:
|
Angle Range | Int32 | Bezieht sich auf den Winkelbereich, wie er in verschiedenen Bildverarbeitungsaufgaben, z.B.der Kantenerkennung verwendet wird. |
Mögliche Werte:
|
Edges | Segment 2D <Array> | Bezieht sich auf ein zweidimensionales Liniensegment im geometrischen Sinn, also auf einen Teil einer Geraden, der durch zwei Endpunkte im 2D-Raum begrenzt ist. | |
Scores | Single <Array> | Bezieht sich darauf, wie stark oder markant eine Kante an einem bestimmten Pixel ist. |
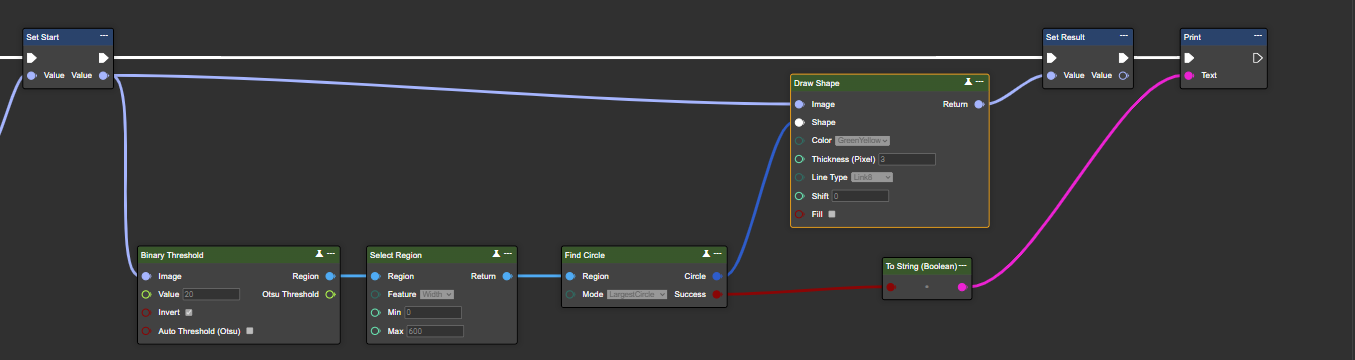
Find Circle
Detektiert einen Kreis innerhalb einer Region. Hierbei ist der Smallest, Fitting, Mean oder Largest Circle auswählbar.
Flow
Parameterset
Parameter | Typ | Beschreibung |
|---|---|---|
Region | 8-Bit-Einzelkanalbild | Es können Knoten wie „Binary Threshold“, „Adaptive Threshold“, „Canny“ oder ähnliche verwenden, um ein binäres Bild zu erzeugen. |
Mode | CircleSelectionMode | Definiert die Auswahlmethode für den erkannten Kreis. Verfügbare Optionen sind FittingCircle, LargestCircle, SmallestCircle und MeanCircle. |
Return | Circle | Bezieht sich auf den gefundenen Kreis aus Center Points und Radius im 2D-Raum. |
Return | Boolean | Gibt an, ob ein Kreis erfolgreich gefunden wurde. |
Mode | Beschreibung | Beispiel |
|---|---|---|
Largest Circle | Der größte Kreis, der komplett innerhalb eines Objekts liegt, ohne den Rand zu schneiden. |  |
Smallest Circle | Der kleinstmögliche Kreis, der alle Punkte/Konturen komplett einschließt. |  |
Fitting Circle | Ein bestmöglich angepasster Kreis, der die Form statistisch approximiert (ähnlich wie eine Regressionskurve). Nutzt Randpunkte, ist nicht zwingend innen oder außen begrenzend. |  |
Mean Circle | Der Radius entsteht aus dem Durchschnitt mehrerer gemessener Radien (z. B. viele Randpunkte → mittlerer Abstand zum Zentrum). Gut bei rauschenden oder ungleichmäßigen Formen. |  |