Measure
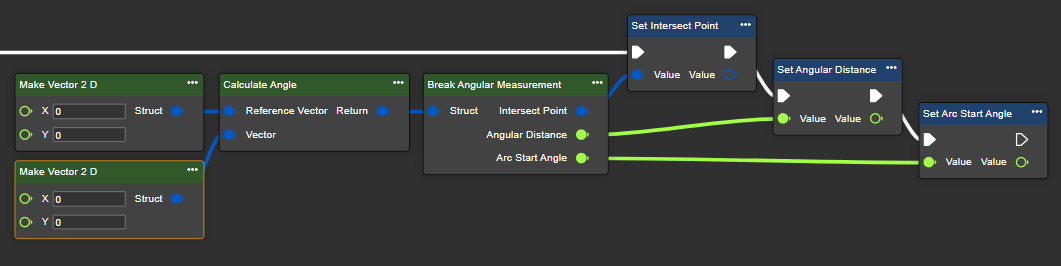
Calculate Angle
This node allows the measurement of an angle between two vectors. The measurement is taken counterclockwise from the reference vector.
The result or its individual components can be broken down using the Break Angular Measurement node and thus used for further processing.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Reference Vector | Vector 2D | The reference vector from which the angle is measured. |
Vector | Vector 2D | The second vector for angle measurement, relative to the reference vector. |
Return | Angular Measurement | The calculated intersection point, the angular distance, and the starting angle of the arc. |
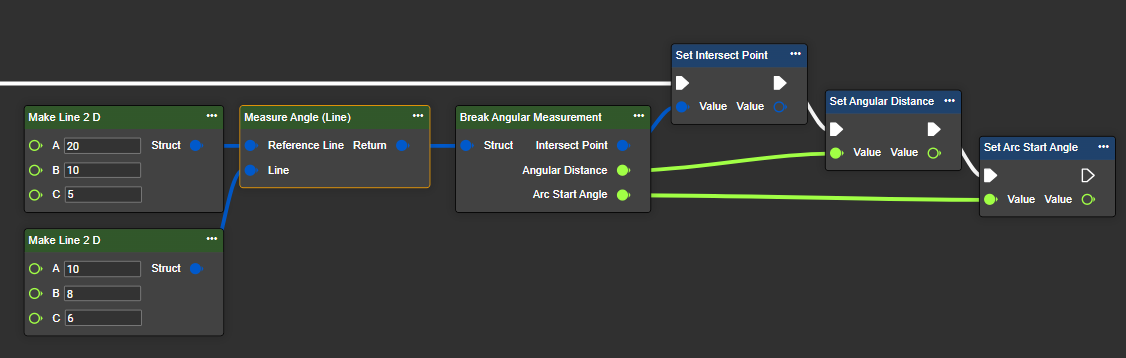
Measure Angle (Line)
This node allows the measurement of an angle between two lines. There is a reference line from which the measurement is taken counterclockwise.
The result or its individual components can be broken down using the Break Angular Measurement node and thus used for further processing.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Reference Line | Line 2D | The reference line from which the angle is measured. |
Line | Line 2D | The second line is for measuring angles, relative to the reference line. |
Return | Angular Measurement | Calculated intersection point, angular distance, and arc start angle. |
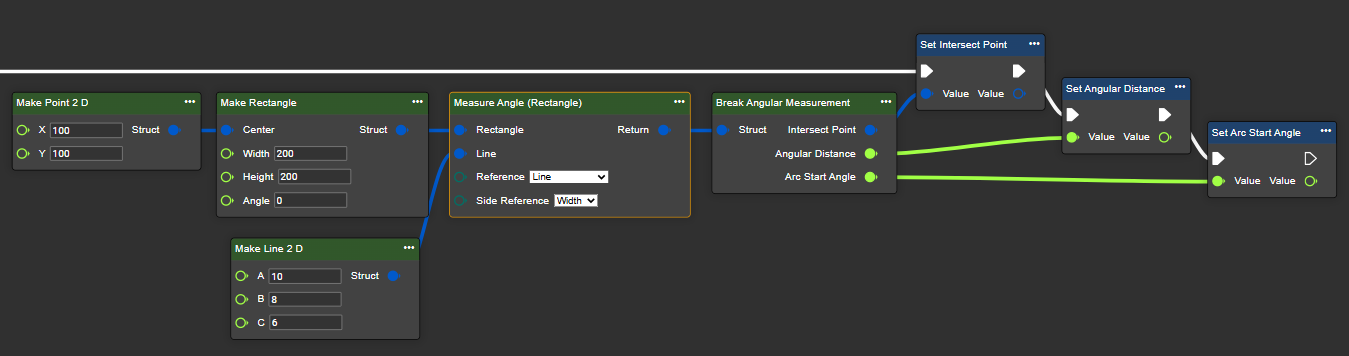
Measure Angle (Rectangle)
Measures the angle between a straight line and a side of a non-square rectangle counterclockwise.
The result or its individual components can be broken down using the Break Angular Measurement node and thus used for further processing.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Rectangle | Rectangle | Rectangle for measuring angle width. |
Line | Line 2D | Line defined as |
Reference | ReferenceType | Indicates whether the angle should be measured using the shorter or the longer side of the rectangle. Possible values:
|
Side Reference | RectangleSideReference | Indicates whether the angle should be measured using the shorter or the longer side of the rectangle. Possible values:
|
Return | Angular Measurement | Calculated intersection point, angular distance, and arc start angle. |
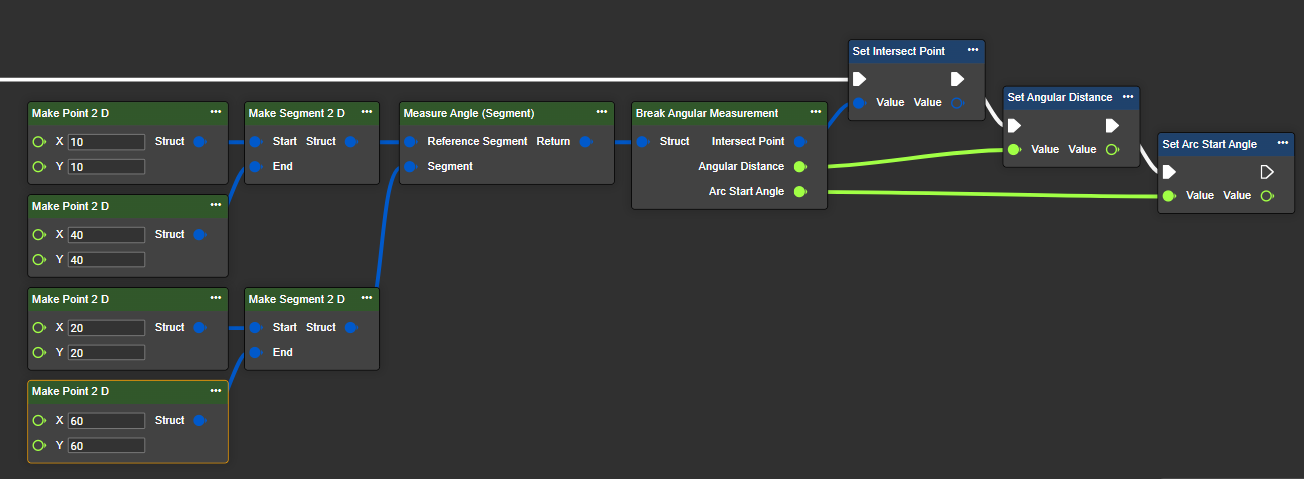
Measure Angle (Segment)
This node allows the measurement of an angle between two lines. There is a reference line from which the measurement is taken counterclockwise.
The result or its individual components can be broken down using the Break Angular Measurement node and thus used for further processing.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Reference Segment | Segment 2D | The reference segment from which the angle is measured. |
Segment | Segment 2D | The second segment, used to measure the angle relative to the reference segment. |
Return | Angular Measurement | Calculated intersection point, angular distance, and arc start angle. |
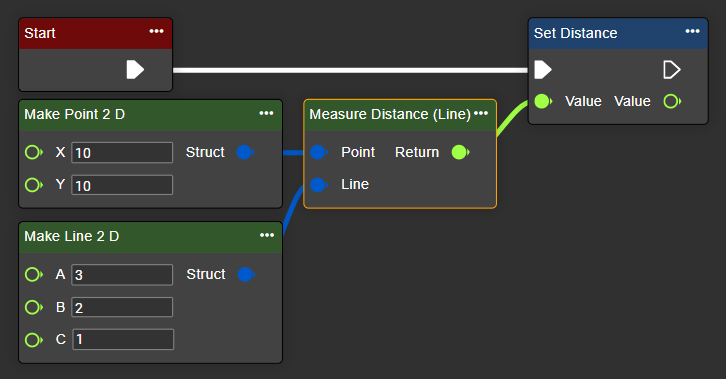
Measure Distance (Line)
This node allows you to measure the distance between a line and a point.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Point | Point 2D | The reference point from which the distance is measured. |
Line | Line 2D | The straight line defined by the equation |
Return | Single | Measured distance in pixels. |
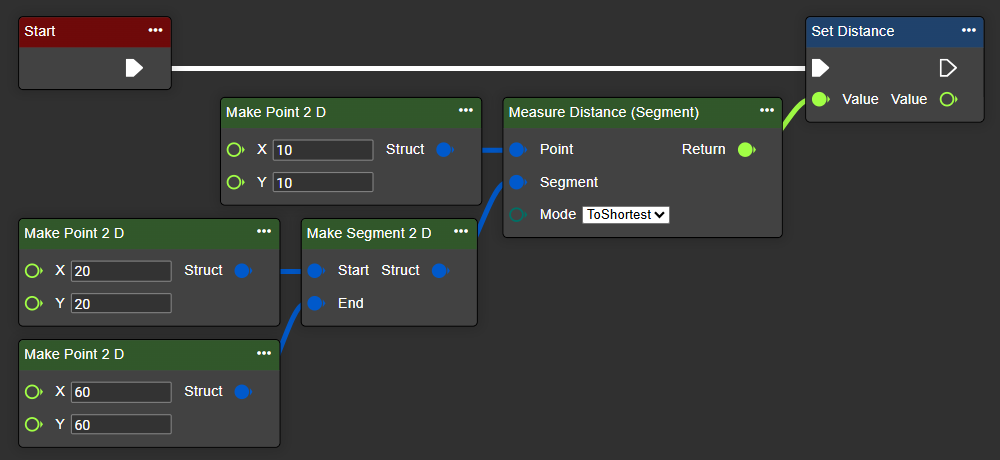
Measure Distance (Segment)
This node allows you to measure the distance between a line segment and a point.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Point | Point 2D | The reference point from which the distance is measured. |
Segment | Segment 2D | The input segment used for distance calculations. |
Mode | DistanceMode | The method of distance measurement. You can choose between three modes:
|
Return | Single | Measured distance in pixels. |
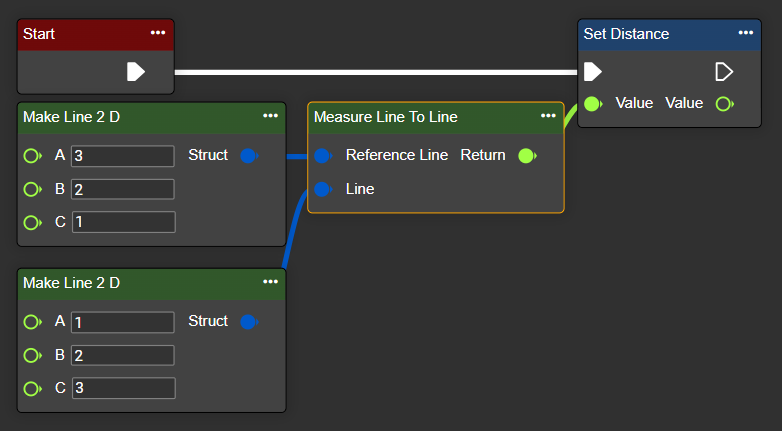
Measure Line To Line
This node allows you to measure the distance between two lines.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Reference Line | Line 2D | The reference line from which the distance is measured. |
Line | Line 2D | The straight line defined by the equation |
Return | Single | Calculated distance in pixels. |
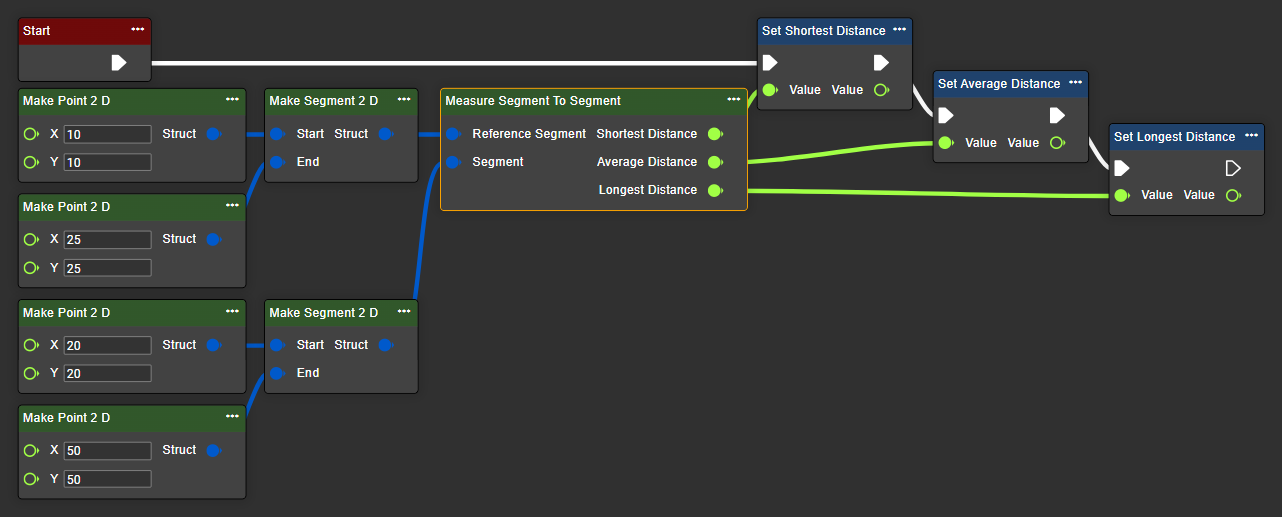
Measure Segment To Segment
This node allows the measurement of the distance between two segments. It calculates the shortest, average, and longest distances between the segments.
Flow
Parameter set
Attribute | Type | Description |
|---|---|---|
Reference Segment | Segment 2D | The reference segment from which the distance is measured. |
Segment | Segment 2D | The input segment to which the distance is measured. |
Shortest Distance | Single | Shortest distance between segment and reference segment. |
Average Distance | Single | Average distance between segment and reference segment. |
Longest Distance | Single | Longest distance between segment and reference segment. |
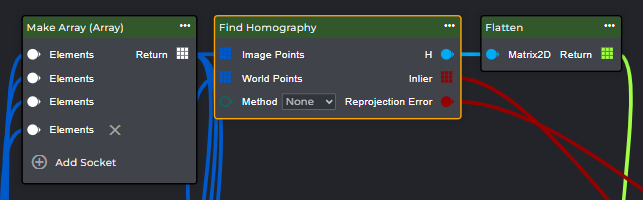
Find Homography
Calculates the homography matrix H, which maps image coordinates to world coordinates, optionally using a robust estimation method.
Flow
Parameter set
Parameter | Type | Description |
|---|---|---|
Image Points | Point 2D<Array> | The set of image points (e.g., pixel coordinates) used as source positions. |
World Points | Point 2D<Array> | The corresponding world points that are used as target positions. |
Method | HomographyMethods | The robust estimation method to be used in calculating homography. |
H | Matrix2D | The 3x3 homography matrix H, which maps image points to world points. |
Inlier | Boolean | A mask that indicates for each pair of points whether it has been accepted as an inlier. |
Reprojection Error | Boolean | True if all inlier points satisfy the reprojection error constraints; otherwise false. |
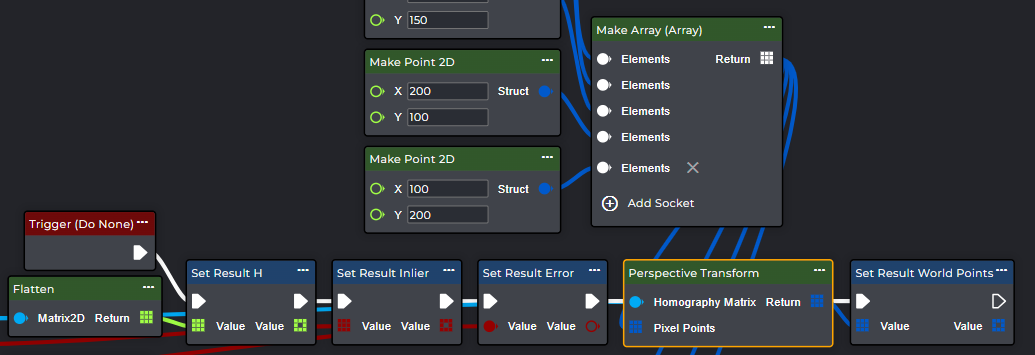
Perspective Transform
This node enables the conversion of pixel values into the metric system based on the matrix H and the determined pixels.
Flow
Parameter set
Parameter | Type | Description |
|---|---|---|
Homography Matrix | Matrix 2D | The homography matrix, which can be calculated using the "Find Homography" node. |
Pixel Points | Point 2D<Array> | Points at the source level that are to be transformed to the target level. |
Return | Point 2D<Array> | Returns the converted points based on matrix H and the determined pixels. |